Multi-UAV Trajectory Planning in Wireless Communications using Reinforcement Learning
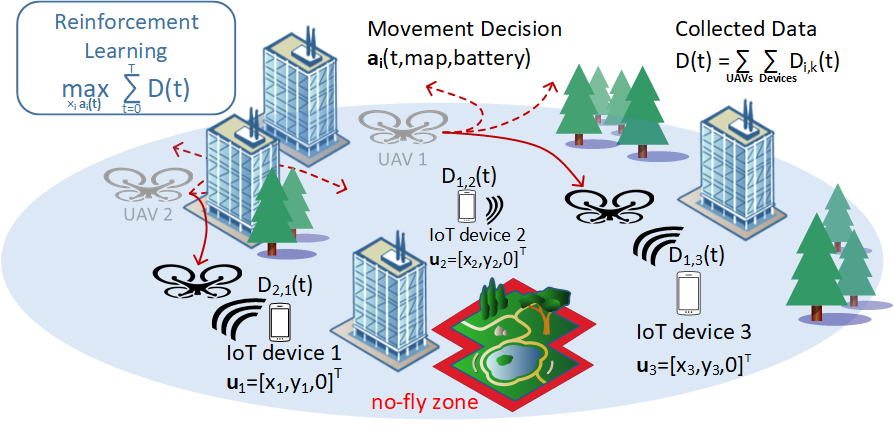
Reinforcement learning is very promising as a paradigm to tackle various instances of autonomous unmanned aerial vehicle (UAV) trajectory planning. In a wireless communications context, a UAV carrying a wireless access point can extend wireless coverage beyond existing stationary infrastructure, provide additional capacity in areas of high demand, and due to its fast and flexible deployment, re-establish connectivity in natural disaster events and search-and-rescue operations. In all scenarios, the mobility of the UAV is the most important systematic advantage, making the trajectory planning problem dependent on the communications performance goals of the system.
The Robotics point of view: UAV Coverage Path Planning
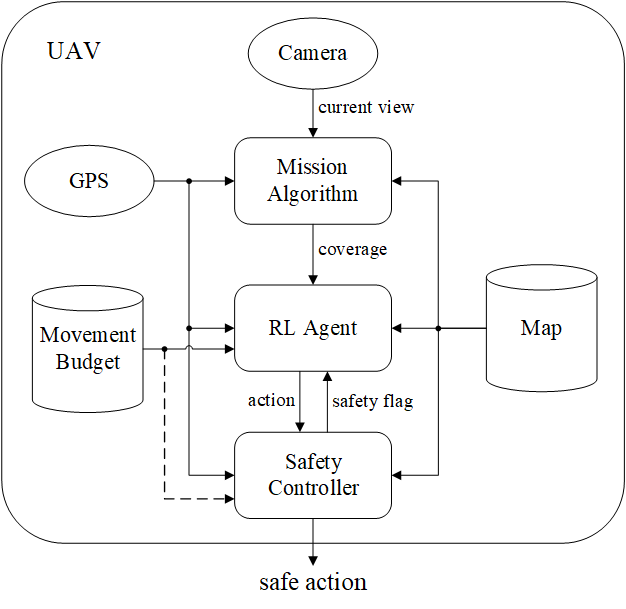
Coverage path planning (CPP) is the task of designing a trajectory that enables a mobile agent to travel over every point of an area of interest. As its name suggests, CPP is related to conventional path planning between start and goal positions and defines one of the standard problems in motion planning for robotics. It is relevant for UAVs on a wide range of missions, such as surveying and photogrammetry, smart farming, and also disaster management. In a cooperation project between Technical University of Munich (TUM) and EURECOM, we have worked on leveraging end-to-end deep reinforcement learning to find a planning policy that can adapt to changes in the UAV's mission environment without retraining.
Phasor Quaternion Autoencoder (PQAE) for Radar Satellite Data (JSPS Summer Program at The University of Tokyo)
Data collected by radar satellites observing earth is an indispensable source of environmental information forming the basis for scientific disciplines like meteorology, oceanography or climate research. In comparison to other sensor technologies like optical imaging, radar has the capability to collect data under all environmental conditions, e.g. at night or under cloud cover.
A particular type of radar frequently used is polarimetric synthetic aperture radar (PolSAR) which collects data in a manner that is sensitive to the polarization of the transmitted and received electromagnetic waves. One data point generated in this
way can be represented by a 4-element vector of real numbers, which can be represented by one Quaternion number. Interferometric PolSAR (PolInSAR) is a technique to increase the information content of PolSAR observations further by combining two observations of the same target area. This adds a phase difference to the data that is proportional to the elevation of the observed target area, thereby capturing an essential feature of the observed target area. I implemented an autoencoder that is capable of processing this data natively, the Phasor Quaternion Autoencoder (PQAE).
Real-world Experiments on Autonomous UAV Relay Positioning
Soccer Robots for RoboCup (Robotics Erlangen)